米国の宇宙機関は現在、潜在的に危険な小惑星ベンヌからサンプルを収集することを目指しています。 さらに、先日、彼らはこのオブジェクトのこれまでで最も詳細なマップを提示しました。
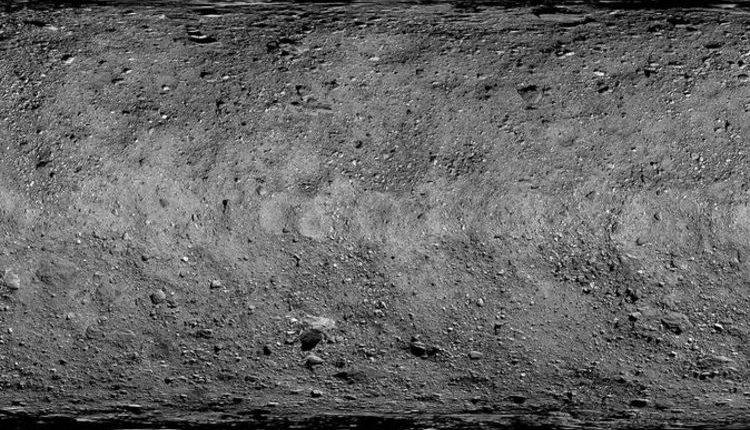
この小惑星ベンヌの表面の地図は、昨年3月7日から4月19日までにOSIRIS-REx宇宙船によって収集された画像のモザイクです。 米国宇宙局は、PolyCamで撮影した2,155枚の画像をつなぎ合わせて修正し、この詳細な地図を作成したことを確認しました。
詳細は1ピクセルあたり5cmです。 NASA宇宙船は、小惑星の表面から3.1〜5kmの距離でこれらの画像を収集しました。 フルサイズのモザイクバージョンは、こちら(モザイクのみ)およびこちら(座標系モザイク)からダウンロードできます。
この夏、OSIRIS-REx宇宙船は、NASAが小惑星の表面に触れ、サンプルを収集し、安全に戻ることを初めて試みます。 しかし、小惑星ベンヌに装置が到着してから1年以上が経過しました。 これは、オブジェクトの表面が以前に考えられていたよりもはるかに岩が多いことが判明したという事実によるものです。 文字通り岩が散らばっています。
ミッションは当初、直径50メートルの着陸エリアを想定していましたが、ベンヌで最大の安全エリアははるかに小さかった。 最大のセクションの幅はわずか16メートルで、想定される安全領域の約10パーセントです。
チームは、宇宙船が潜在的な危険を回避しながら非常に小さな領域を正確にターゲットにできるようにする、より正確なナビゲーション技術が必要であることに気づきました。 これらの危険な岩を道標として使用して、ミッションチームはこの問題に対処するための新しい精密ナビゲーション方法を開発しました。
当初の計画は、電波ではなくレーザーパルスに基づくLIDARシステムを使用することでした。 ただし、この問題に直面して、OSIRIS-RExチームはNatural FeatureTrackingと呼ばれる新しいナビゲーション方法に切り替えました。
LIDARよりも幅広いナビゲーション機能を提供し、宇宙船をはるかに小さなサンプリングエリアに入れるための鍵となります。 この方法は光学ナビゲーションに基づいており、宇宙船に搭載された高解像度画像のカタログを作成する必要があります。